
A fish finder is like having underwater eyes. It uses a part called a transducer to send out sound waves into the water. When these waves hit something, like a fish or the bottom of the lake, they bounce back to the transducer. The fish finder takes this bounced-back info and shows it on a screen, so you can see where the fish are and what’s going on underneath your boat. Think of it like yelling in a canyon and waiting for the echo to come back, but in a watery world with a screen to show you where the “echoes” are coming from!
In this guide, we will deep dive into the operating mechanism of fish finders and give you an overview of the sonar technologies behind fish finders. At the end, you’ll gain a comprehensive understanding of how fish finders work and how to use and read them effectively for successful fishing.
What is a Fish Finder?
A fish finder is an electronic device used by anglers and fishermen to locate fish underwater. It operates using the principles of SONAR (Sound Navigation and Ranging).
SONAR produces ultrasonic waves, which are sound waves with frequencies higher than the upper audible limit of human hearing. This technique is used in fish finders because ultrasonic waves can travel efficiently through the water, reflect off objects like fish or the seabed, and return as echoes. By analyzing these echoes, fish finders can determine the location, depth, and size of underwater objects, aiding anglers in locating fish.
Here’s a breakdown of what fish finders are capable of:
- Fish Location: The primary function of a fish finder is to locate fish underwater. By interpreting the returned sonar waves, fish finders can provide a visual representation of fish presence in the water column.
- Water Depth: Fish finders measure the depth of the water by calculating the time it takes for the sonar waves to hit the bottom and return to the surface.
- Bottom Contour: They can provide an outline of the underwater terrain, showing the contours of the bottom, which is useful for identifying suitable fishing spots.
- Underwater Structures: Fish finders can also detect underwater structures such as rocks, vegetation, and sunken objects which might be hiding places for fish.
- Temperature and Speed: Advanced fish finders can measure water temperature and boat speed, aiding anglers in finding the optimal conditions for fishing.
Main Components of Fish Finder
A fish finder consists of primarily 2 main parts:
- Transducer: This is the most crucial component of a fish finder. It emits sonar waves into the water, which then bounce off objects like fish or the sea floor and return to the transducer. The transducer captures these reflected waves and sends the data back to the main unit for processing.
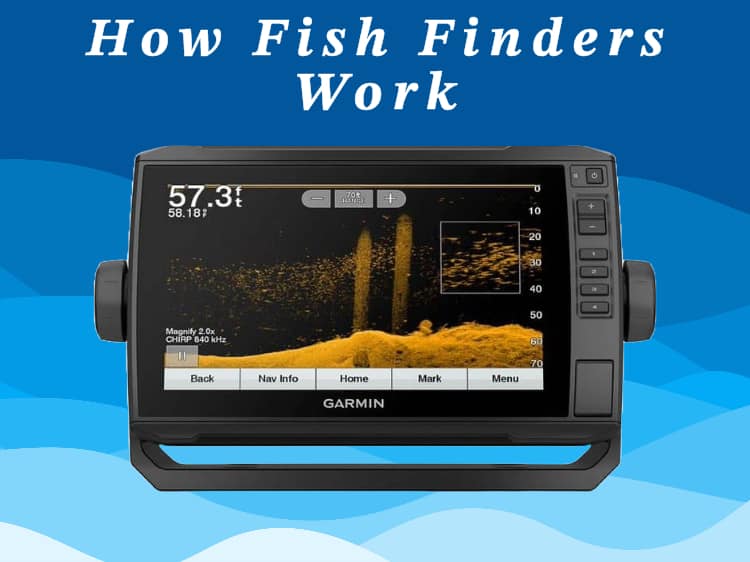
- Main Unit with Display Screen: The main unit houses the display screen and the processing electronics. It’s here where the data collected by the transducer is processed and displayed for the user. The display can show the underwater environment in a graphical or digital format, indicating the presence of fish, the depth of the water, the temperature, and other useful information.
The following image shows the main unit with a transducer:

How Fish Finders Work
Here’s the step-by-step detail of how fish finders work:
- Transmission of Ultrasonic Waves: The fish finder operates using a transducer. This transducer emits ultrasonic waves, which are sound waves at a frequency higher than what the human ear can detect. These waves travel through the water column.
- Reflection and Reception: When these ultrasonic waves encounter an object underwater, whether it’s a school of fish, a single fish, or even the seabed, part of these waves get reflected back towards the surface. This phenomenon is similar to how an echo works. Just as you might shout in a canyon and hear your voice echo back, the fish finder sends out sound waves and “listens” for their return echo.
- Interpretation of Data: The time it takes for the echo to return provides information about the depth at which the object (e.g., fish) is located. This is because the speed of sound in water is relatively constant, so the time delay can be translated directly into a distance. The strength of the returned signal can give clues about the size and composition of the object. A big, solid object will reflect a stronger signal than a small, soft object.
- Display: The fish finder’s screen or display then visualizes this data. On the screen, users can see graphical representations or icons indicating fish, along with depth markers. Some advanced units can even show detailed images that represent the shape of the seabed, underwater structures, and vegetation.
How does a fish finder transducer work
A transducer works as the primary sensing device in a fish finder system, converting electrical signals into sound waves and vice versa. Here’s a breakdown of its operating mechanism:
- Transmission of Sound Waves: The fish finder sends an electrical signal to the transducer. The transducer contains a piezoelectric element, often made of ceramic or crystal. When this element receives the electrical signal, it vibrates. These vibrations produce ultrasonic sound waves, which the transducer emits into the water.
- Reflection of Sound Waves: As these ultrasonic sound waves travel through the water, they’ll reflect or “bounce back” when encountering objects like fish, underwater structures, or the seabed. These reflected sound waves are often referred to as “echoes.”
- Reception of Echoes: The same piezoelectric element in the transducer that emitted the sound waves is also responsible for detecting the returning echoes. When these echoes reach the transducer, they cause the piezoelectric element to vibrate again.
- Conversion Back to Electrical Signals: The vibrations induced by the incoming echoes generate an electric charge in the piezoelectric element due to its intrinsic properties. This electric charge is converted into an electrical signal that represents the strength and timing of the received echo.
- Data Processing: The electrical signal is sent to the main unit of the fish finder, which processes it. By analyzing the time interval between emitting the sound wave and receiving the echo, the fish finder calculates the distance to the object. The strength of the returned signal can provide information about the size and composition of the detected object. The processed data is then displayed visually on the fish finder’s screen, showing the depth, location, and often the shape of underwater objects and fish.
In summary, the fish finder transducer operates as a cyclical system: it emits sound waves, waits for the echoes, detects the returning sound waves, and then converts those back into electrical signals for analysis and display. This mechanism allows anglers to “see” beneath the water’s surface.
How does a fish finder detect fish
Fish finders use sonar technology to detect fish, and the mechanism revolves around the unique characteristic of a fish’s anatomy: the swim bladder. Here’s a step-by-step explanation:
- The fish finder’s transducer emits ultrasonic waves into the water.
- Fish have an organ called the swim bladder, which they use to maintain buoyancy. This bladder is filled with air or gas.
- When the ultrasonic waves emitted by the transducer encounter the air in a fish’s swim bladder, there’s a significant contrast between the density of the fish’s body and the air in the swim bladder. This contrast causes the waves to reflect or “bounce back.” In essence, the swim bladder acts as a prominent reflector of sonar waves.
- The transducer captures the reflected waves or echoes. The presence of these echoes indicates that the waves have encountered an object with a differing density from the surrounding water.
- The fish finder processes the strength and timing of these reflected signals.
- Based on the time it takes for the echoes to return and the intensity of the returned signal, the fish finder determines the depth, size, and location of the fish.
- The device then translates this data into visual representations or icons on its screen, indicating the presence and position of fish.
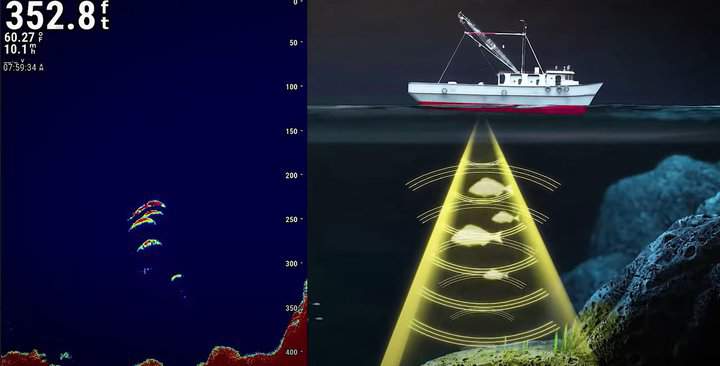
- On the fish finder’s display, the fish might be shown as individual arches, dots, or even fish icons, depending on the device’s sophistication and settings.
The following image illustrates how fish appear on the sonar when they pass through ultrasonic waves.
Operating Mechanism of Fish Finder Frequencies
Fish finder frequencies refer to the number of sound waves or sonar pulses the transducer sends out into the water over a specified period, usually measured in kilohertz (kHz).
A transducer generates different frequencies primarily through the design and composition of its piezoelectric material The shape and thickness of the piezoelectric element play a crucial role; thinner elements and smaller dimensions generally yield higher frequencies, while thicker elements and larger dimensions lead to lower frequencies.
Here are the common frequencies found in the fish finders:
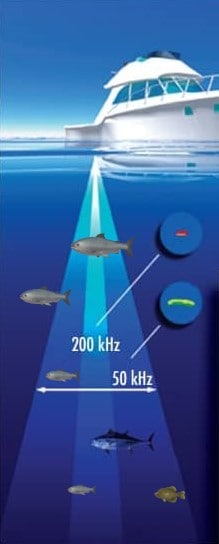
- Low Frequency (50/83 kHz): Low frequencies penetrate deeper into the water and provide a broader search area due to a wider cone angle. However, they offer less detail in the images.
- Mid Frequency (200 kHz): Mid frequencies offer a balance between depth penetration and detail, making them a good choice for varied fishing conditions.
- High Frequency (455/800 kHz): High frequencies provide the most detail and are excellent for shallow water fishing but have less depth penetration.
Choosing the right frequency is crucial for effective fish finding. High frequencies are better for detailing and in shallow waters, while low frequencies are better for deep water fishing. A fish finder with adjustable or multiple frequency capabilities provides the most versatility for different fishing environments and objectives.
The below image depicts the depth range and cone angle of different frequencies.
Understanding Fish Finders Technology
The first fish finder for recreational use was introduced by the Japanese company Furuno in the 1950s. Over the decades, the technology in fish finders has evolved remarkably. Initially, these devices were bulky and provided basic echo sounding to detect fish, but with the advent of transistors in the 1960s, they became more compact and affordable.
The integration of GPS technology in the late 20th and early 21st centuries marked a significant advancement, providing anglers with navigational aid alongside fish detection. Modern-day fish finders are now equipped with sophisticated features like high-resolution color displays, CHIRP (Compressed High Intensity Radar Pulse) sonar technology, Down Imaging, Side Imaging, and connectivity options like Wi-Fi and Bluetooth.
Additionally, they offer various mounting options and portability for use on different types of watercraft, from kayaks to larger vessels.
With these advancements, fish finders have become invaluable tools for both recreational and commercial anglers, offering enhanced capabilities to locate fish and navigate waters more effectively.
CHIRP Sonar
CHIRP stands for Compressed High Intensity Radar Pulse. Unlike traditional sonar that sends a single frequency pulse at a time, CHIRP sends a continuous sweep of frequencies ranging from low to high. This provides a much wider range of information for the fish finder to process, resulting in higher-resolution, clearer images with better target separation. CHIRP sonar is effective in both shallow and deep water, and can better differentiate between fish targets and the bottom structure.
Down Imaging Sonar
Down Imaging provides a highly detailed view of the underwater area directly beneath the boat. It utilizes high-frequency sonar waves that are emitted in thin slices scanning the water column vertically. The high-frequency waves enable capturing finer details, providing a photo-like image of the underwater environment. Down Imaging fish finders help anglers see structures, vegetation, and fish with great clarity and detail beneath the boat.
Side Imaging Sonar
Side Imaging, as the name suggests, provides a wide, side-to-side perspective of the underwater area around the boat. It employs a sonar beam that scans the water horizontally, extending to either side of the boat, providing a detailed, almost photographic image of the underwater landscape. Side Imaging fish finders help anglers to cover a larger search area and identify structures, vegetation, and fish hiding spots on either side of the boat.
FAQs
How to Choose Fish Finder
Choosing a fish finder involves considering your fishing needs, the type of water body you’ll be fishing in, and your budget.
Firstly, decide on the type of sonar technology you want; CHIRP sonar provides excellent target separation, while Down Imaging and Side Imaging offer detailed views below and around your boat respectively. If you fish in varied environments, a fish finder with multiple sonar technologies or adjustable frequencies would be beneficial.
Secondly, consider a fish finder with GPS functionality to mark fishing spots and navigate waters.
The screen size and resolution are also important for easy reading and interpreting of underwater data. Ensure the fish finder is within your budget but also consider investing in a slightly higher-end model for better functionality and durability.
How to Use Fish Finder
Using a fish finder starts with a proper installation where the transducer is mounted on the boat and the main unit is placed in an easily accessible area.
Once installed, power on the fish finder and if it has GPS, allow it to acquire a satellite signal. Familiarize yourself with the settings, adjusting the frequency based on the water depth – lower frequencies for deeper water and higher frequencies for shallow water. Utilize the zoom feature to get a closer look at specific water columns and adjust the sensitivity to filter out unwanted noise or to enhance weaker signals.
If your fish finder has CHIRP, Down Imaging, or Side Imaging, experiment with these technologies to understand the underwater environment better. Utilize the GPS and mapping features to mark productive fishing spots and to navigate waters safely. Over time, interpret the symbols and colors on the screen to differentiate between fish, structures, and the bottom.
You can also refer to our guide on How to Use Fish Finder to get the most out of your fish finder. As you gain experience, tweak the settings to suit your fishing style and the conditions of the water body you are fishing in.
How to Read Fish Finder
Reading a fish finder involves interpreting the data displayed on the screen which showcases underwater conditions and objects.
Initially, familiarize yourself with the basic features and settings of your fish finder. On the screen, fish may be displayed as arches or icons, depending on your unit’s settings. Understanding the depth scale is crucial; it’s usually displayed along the side of the screen, indicating how deep the water is.
The bottom contour and hardness are often shown by a continuous line; a thicker line may indicate a harder bottom. Structure and vegetation may appear as clumps or lines.
Pay attention to color contrasts, as they often indicate different densities; for instance, a dense object may appear as a strong color like red.
Familiarize yourself with any additional features your fish finder may have, such as GPS or temperature readings.
Over time, with practice you’ll become more adept at Reading the Fish Finder and enhance your fishing experience.
What is the difference between Fish Finder and Depth Finder
A depth finder is a device used primarily to determine the depth of the water beneath a boat. It uses sonar technology to send sound waves down through the water; when these waves hit the bottom, they bounce back to the surface and are detected by the device, which then calculates and displays the depth based on the time it took for the waves to return.
The main difference between a fish finder and a depth finder lies in their functionality and complexity. While a depth finder is focused solely on determining water depth, a fish finder is more advanced and versatile, capable of not only determining water depth but also locating fish, identifying underwater structures, and often providing temperature readings and GPS functionality. Fish finders typically have more sophisticated displays and offer a broader range of information about the underwater environment compared to depth finders.
In essence, all fish finders can function as depth finders, but not all depth finders can function as fish finders.